What Does the Scene Look Like from a Scene Point?
M.Irani, T.Hassner and P.Anandan
Abstract
In this paper we examine the
problem of synthesizing virtual views from scene points within the scene,
i.e., from scene points which are imaged by the real cameras. On one hand this
provides a simple way of defining the position of the virtual camera in an
uncalibrated setting. On the other hand, it implies extreme changes in
viewpoint between the virtual and real cameras. Such extreme changes in
viewpoint are not typical of most New-View-Synthesis (NVS) problems.
In our algorithm the virtual
view is obtained by aligning and comparing all the projections of each
line-of-sight emerging from the “virtual camera” center in the input views. In
contrast to most previous NVS algorithms, our approach does not require prior
correspondence estimation nor any explicit 3D reconstruction. It can handle any
number of input images while simultaneously using the information from all of
them. However, very few images are usually enough to provide reasonable
synthesis quality. We show results on real images as well as synthetic images
with ground-truth.
Full paper : ECCV2002-NVS.pdf (1,175kb)
Some results
Example 1 : The Coke-Can Scene
|
Input images (Click to
display images) : |
|
|
|
|
|
|
|
|
Synthesized view from the
green pencile : |
Ground Truth : |
|
|
|



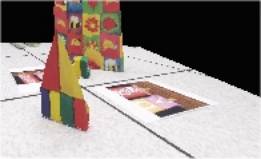
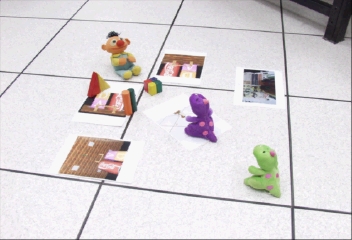
Example 2 : Folder Scene
|
Input images
(Click to display images) : |
|
|
|
|
|
|
|
|
Synthesized
view from the green
dinosaur : |
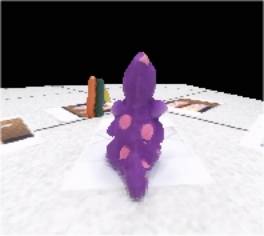
Synthesized
view from the purple
dinosaur : |
|
|
|


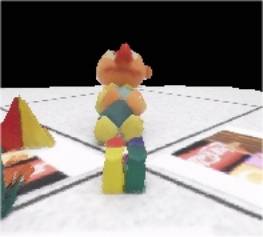
Example 3 : Pupet Scene
|
Input images (Click to
display images) : |
|
|
|
|
|
|
|
|
Synthesized view from the green dinosaur : |
Synthesized view from the purple dinosaur : |
|
|
|
To the Weizmann Institute of Science Home Page
Faculty of Mathematics and Computer Science
Last update : July 8, 2002
For questions and remarks contact hassner@wisdom.weizmann.ac.il
![]()
![]()