- The setup: scene and cameras
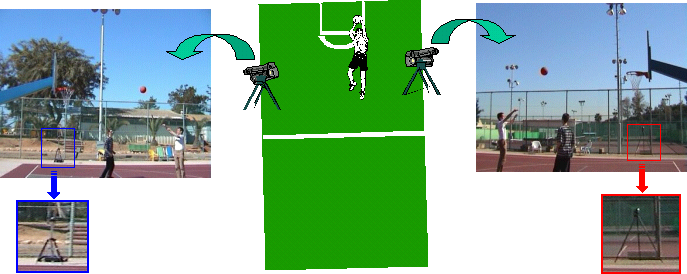 |
Two cameras are looking at each other, capturing basketball field between them.
- Input sequences
| Camera 1 | Camera 2 |
|---|---|
 |
 |
| Video: MPEG 1.4Mb | Video: MPEG 1.4Mb |
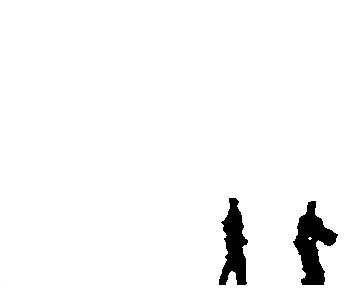
- Detect moving objects
... using background subtraction:| Camera 1 | Camera 2 |
|---|---|
 |
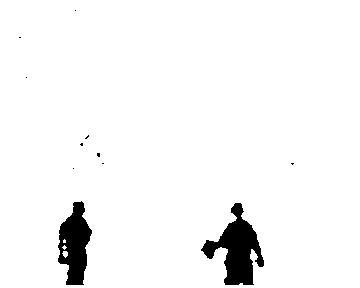 |
| Video: GIF 250Kb AVI 440Kb MPEG 1.4Mb | Video: GIF 240Kb AVI 410Kb MPEG 1.4Mb |
{kind=link}
{kind=link}
- Extract interest points
... by taking the highest point on each blob, in each frame:| Camera 1 | Camera 2 |
|---|---|
 |
 |
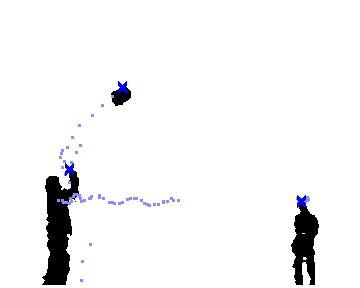
Construct trajectories from these points
| Camera 1 | Camera 2 |
|---|---|
 |
 |
| Video: GIF 250Kb AVI 500Kb MPEG 1.4Mb | Video: GIF 250Kb AVI 450Kb MPEG 1.4M |
| Synchronized video: GIF 450Kb AVI 710Kb MPEG 1Mb | |
{kind=link}
{kind=link}
{kind=link}
- Use the trajectories as features for matching algorithm
| Camera 1 | Camera 2 |
|---|---|
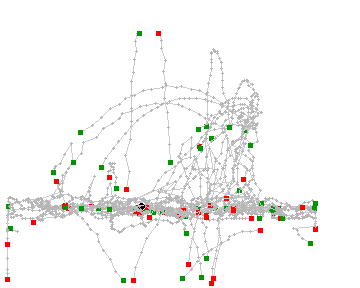 |
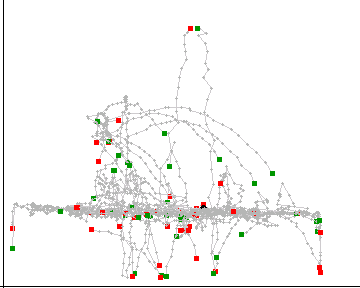 |
There are about 50 trajectories on each side, but at most 3 (two players and the ball) at each given time moment.
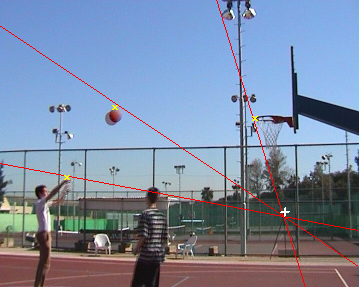
- Recover epipolar geometry (spatial alignment)
| Camera 1 | Camera 2 |
|---|---|
 |
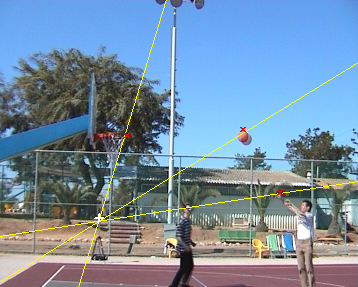 |
red points on the right correspond to the red lines on the left (their epipolar lines).
Points are manually put and their epipolar lines calculated using recovered fundamental matrix.
White cross marks location of the opposite camera (the ground-truth epipole).
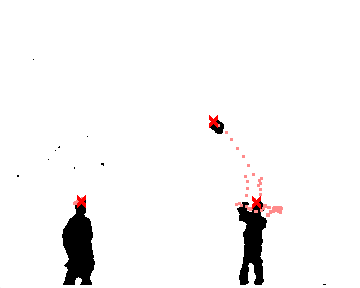
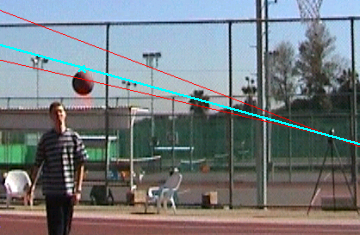
... and sub-frame time shift (temporal alignment)
| Camera 1 | Camera 2 |
|---|---|
 |
 |
Red epipolar lines on the left don't fall on the top of the ball, showing that it doesn't corespond to either ball on the right.
Nevertheless, it corresponds to the interpolated aqua ball, at non-integer frame 0.7.