- The setup: scene and cameras
Two cameras (one visible light PAL, the other infra-red NTSC) are placed next to each other and capturing the same distant scene.
- Input sequences
| Camera 1 (visible light) | Camera 2 (infra-red) |
|---|---|
 |
 |
| Video: AVI 1.4Mb MPEG 1.65Mb | Video: AVI 600Kb MPEG 1.15Mb |
- Detect moving objects
... using background subtraction.- Extract interest points
... by taking the centeroid of each blob, in each frame.Construct trajectories from these points
| Camera 1 (visible light) | Camera 2 (infra-red) |
|---|---|
 |
 |
- Use the trajectories as features for matching algorithm
- Recover homography (spatial alignment) and time shift (temporal alignment)
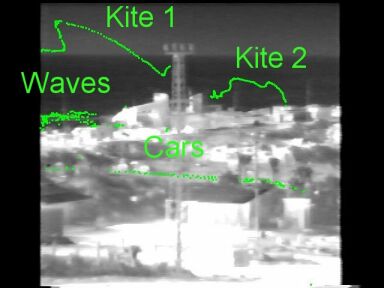
| Fused images (visible light and infra-red) |
|---|
 |
and the kite marked with green circle - in visible light.
In the fused sequence we clearly see both kites.